SRobot
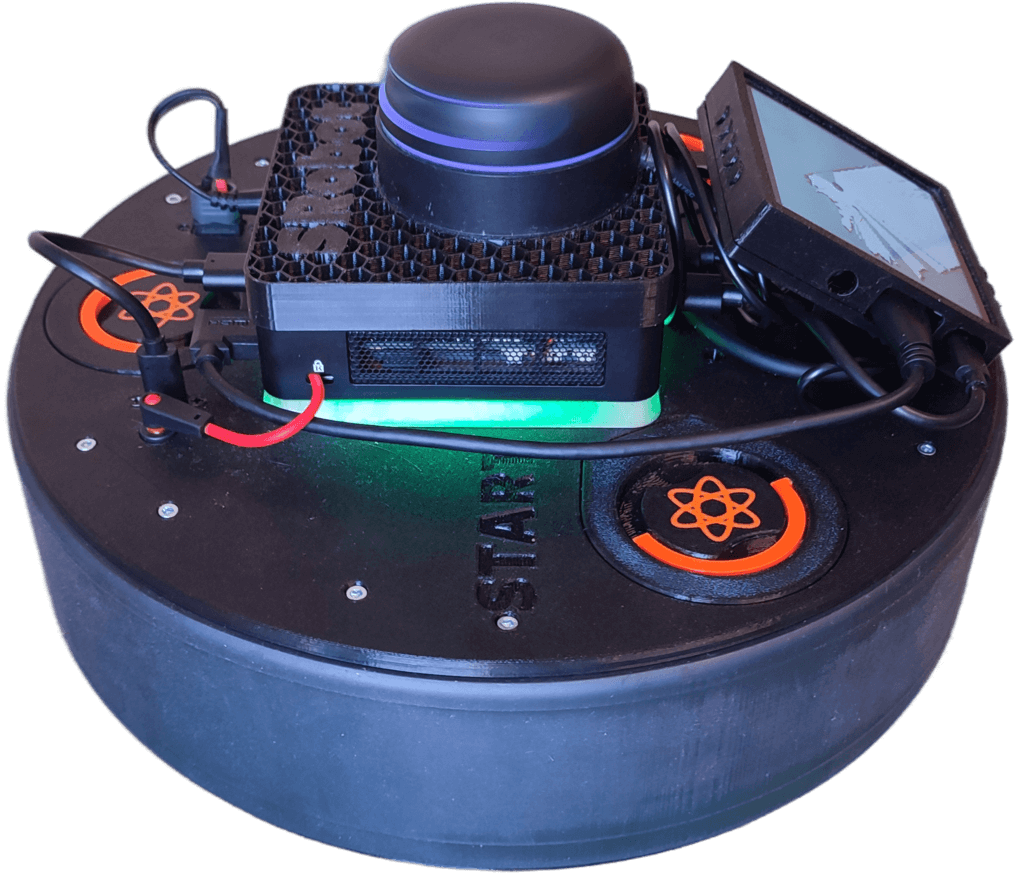
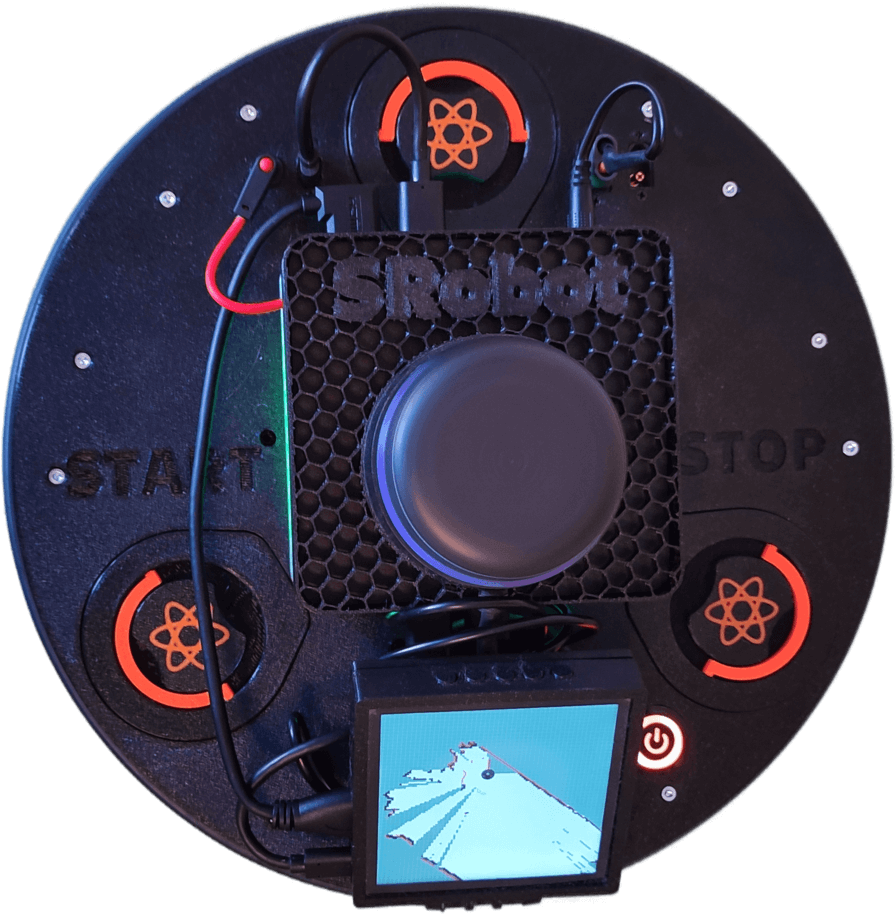
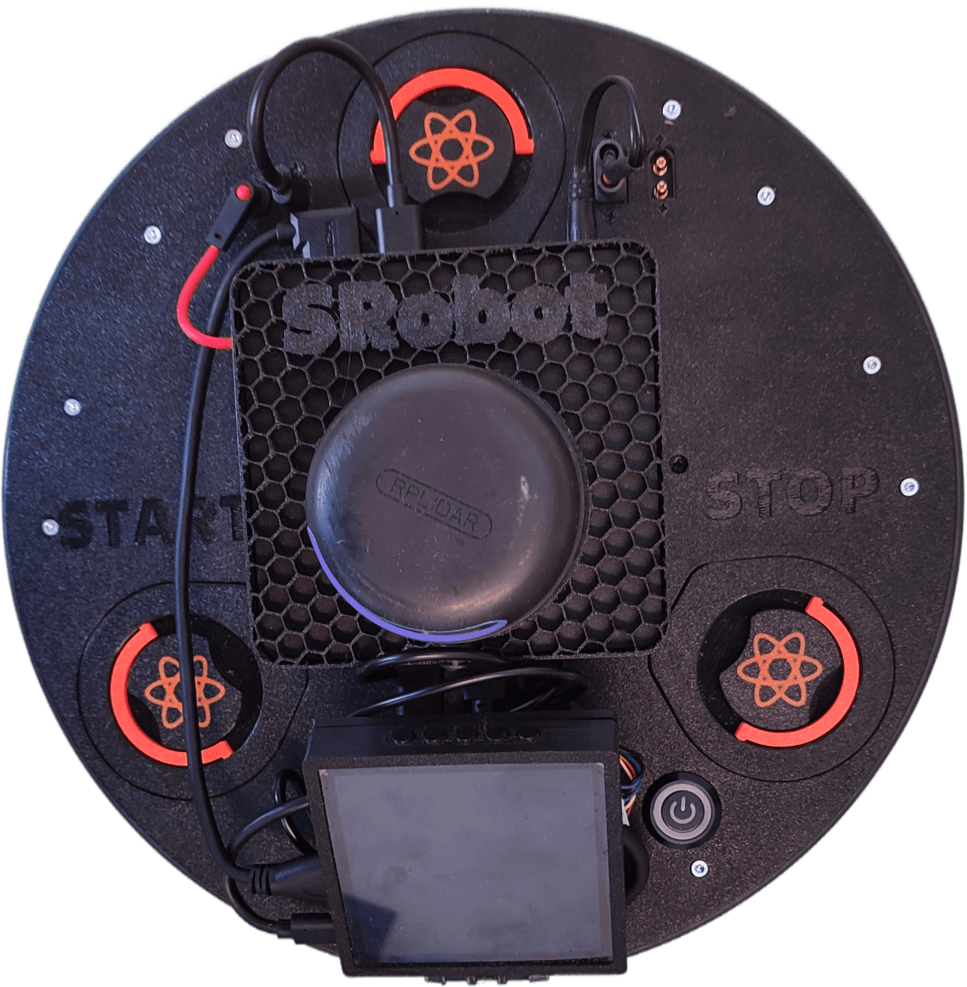
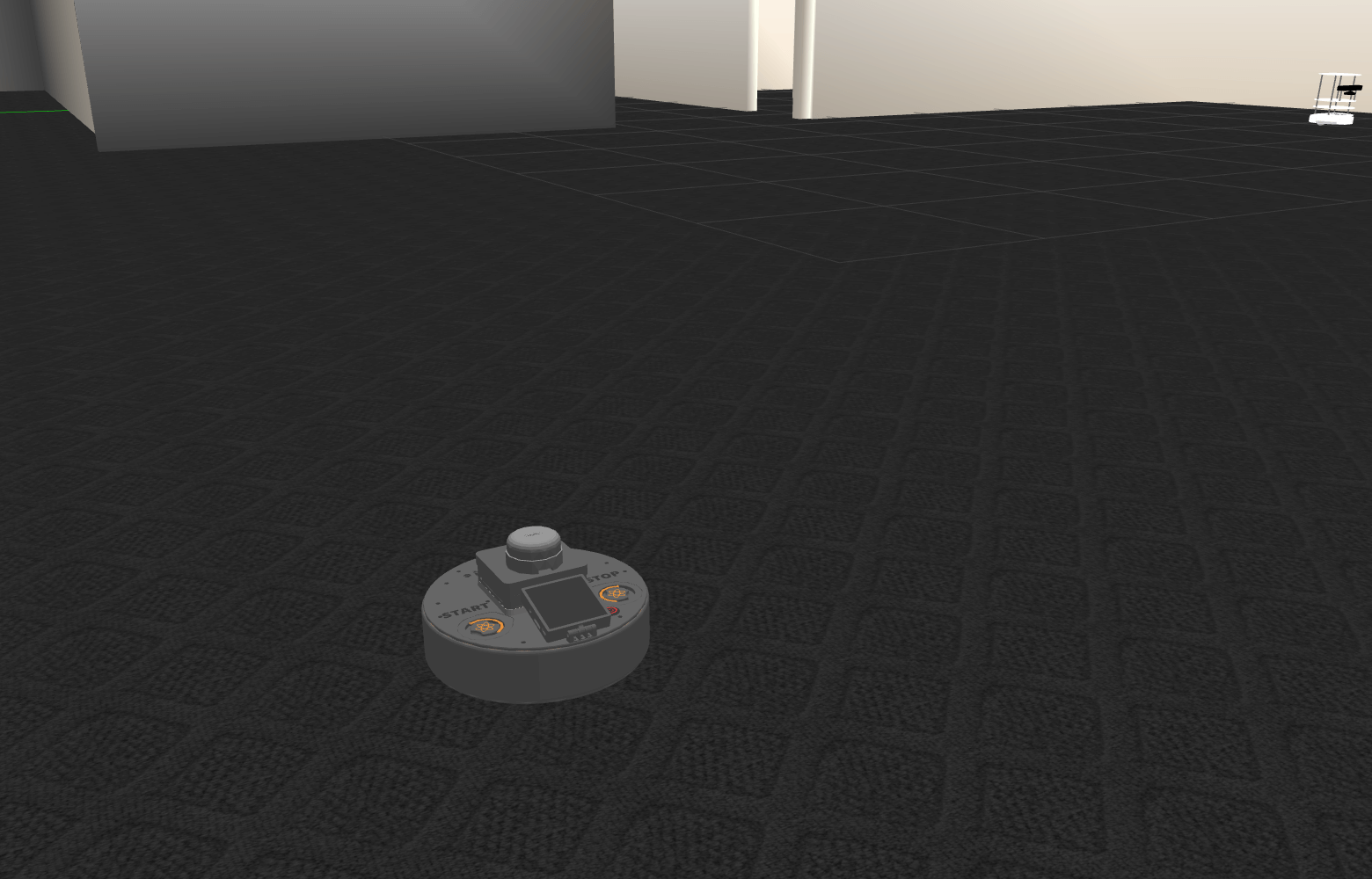
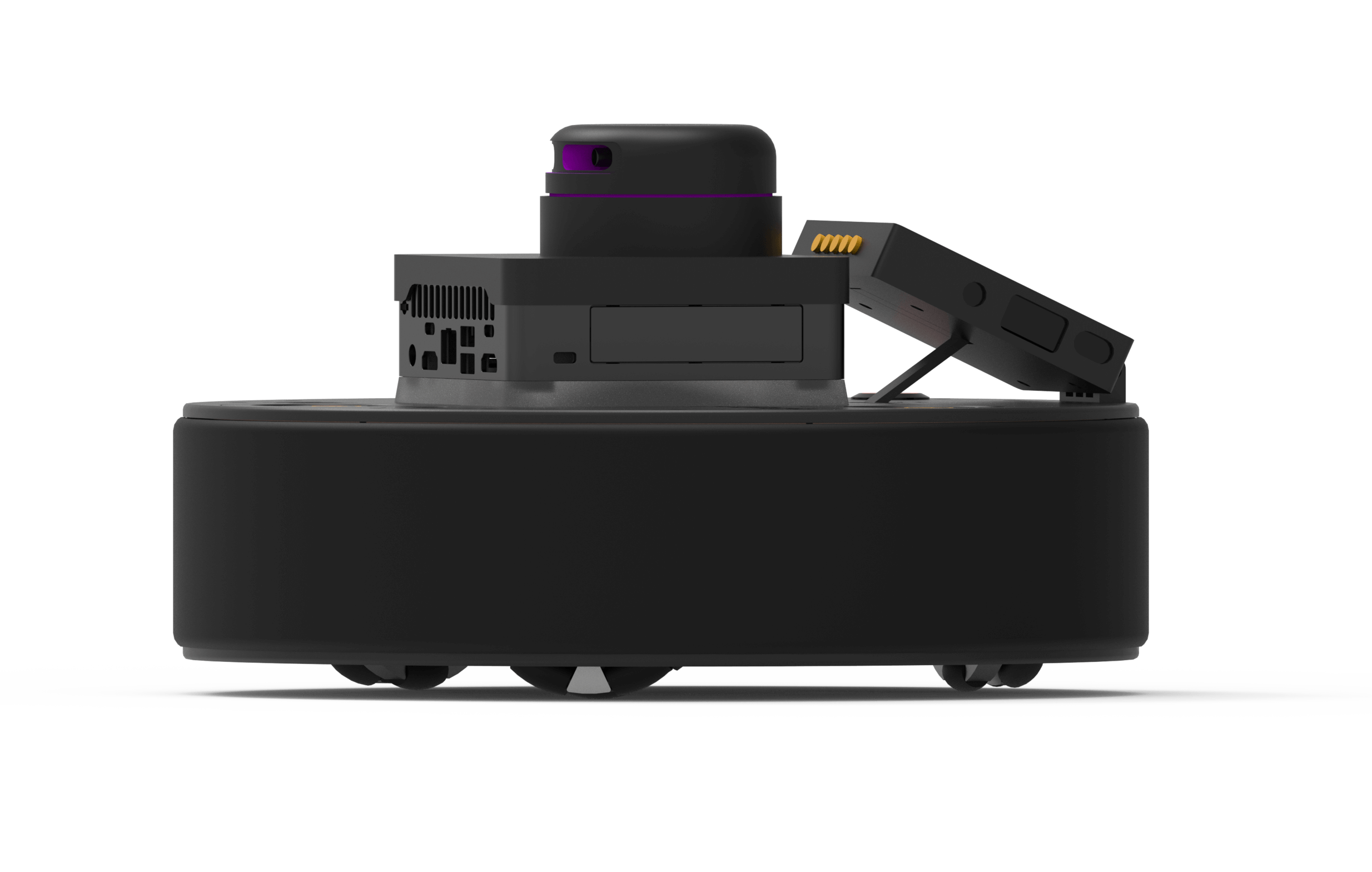
SRobot is an omnidirectional mobile robotic platform meticulously designed as an educational aid for university students. Developed as part of a master’s thesis, SRobot transforms abstract robotics concepts into tangible, hands-on experiences. By integrating hardware and software lessons, it aims to make learning robotics more engaging, practical, and accessible.
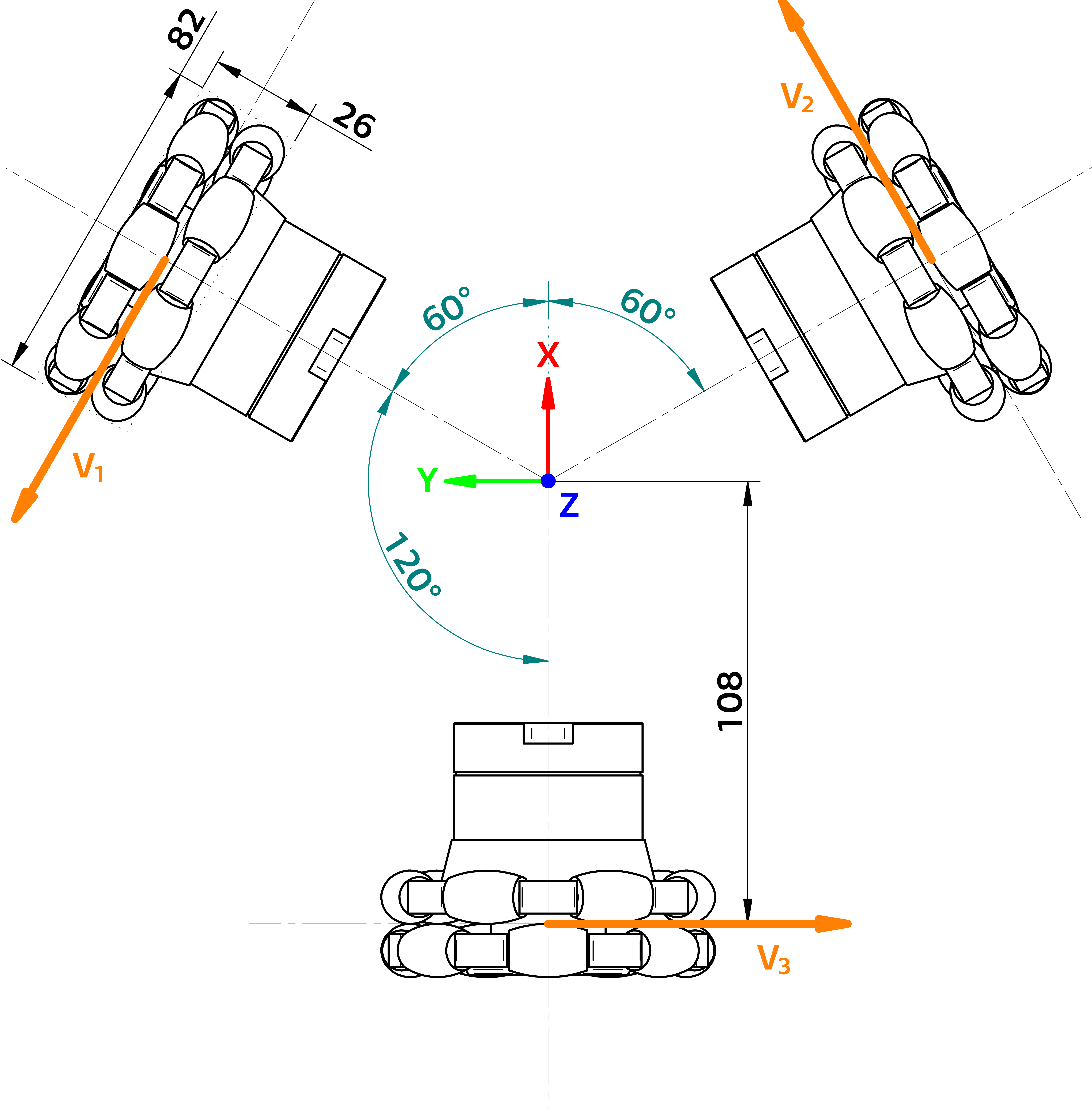
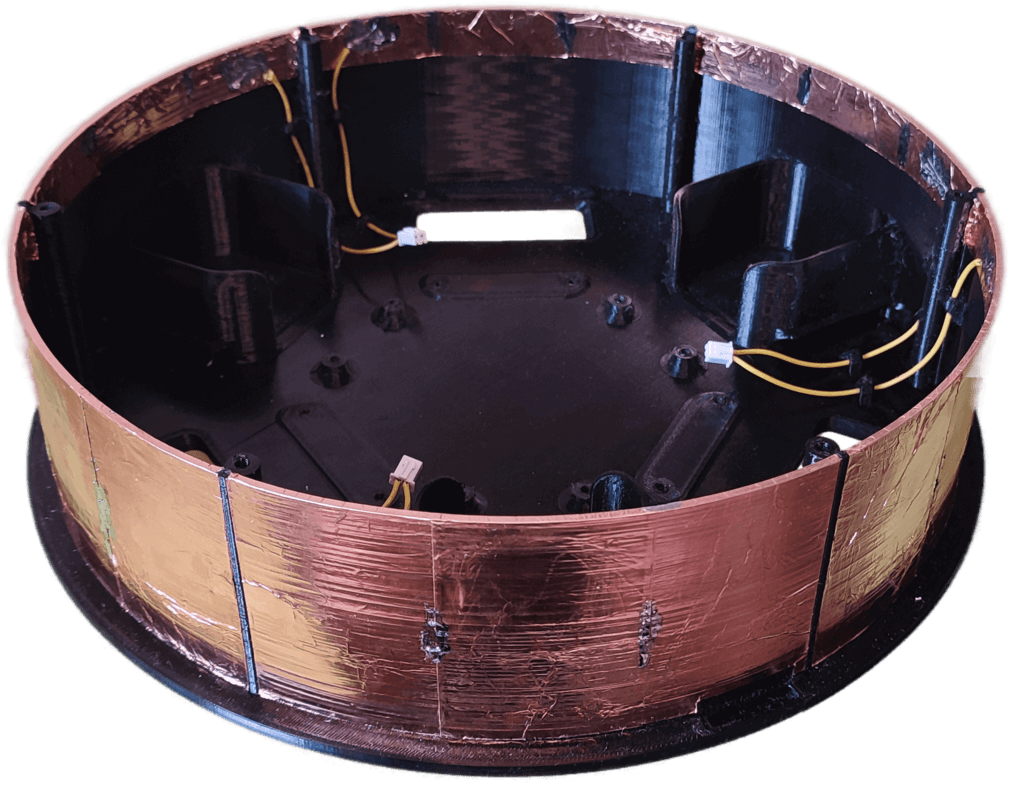
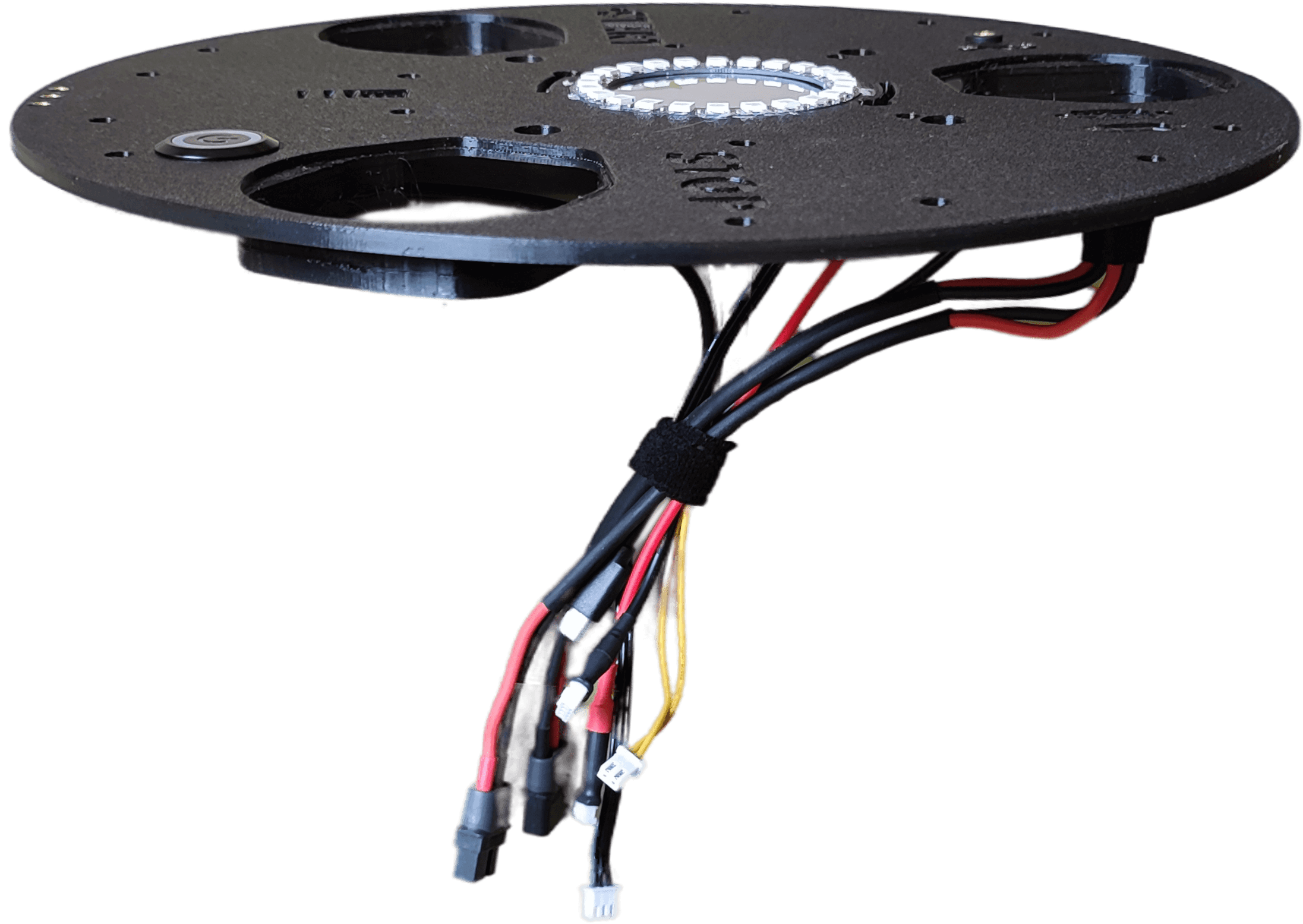
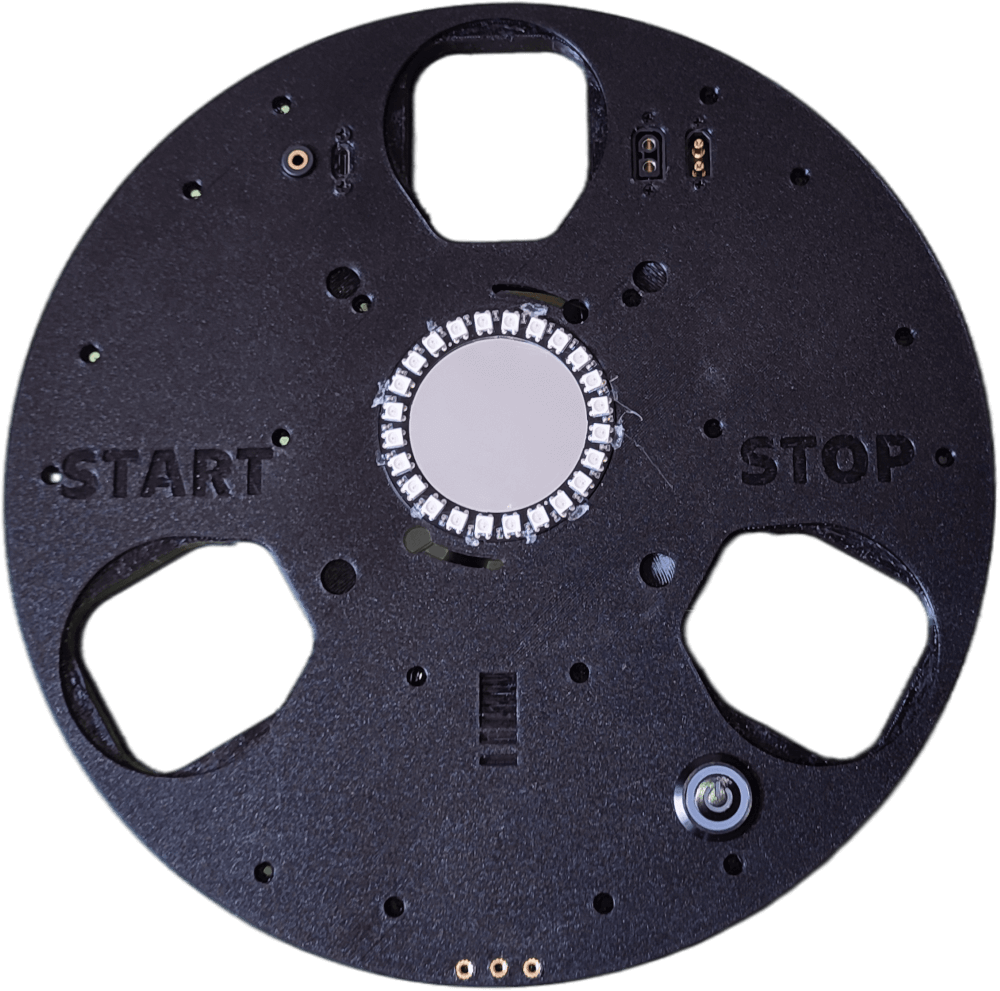
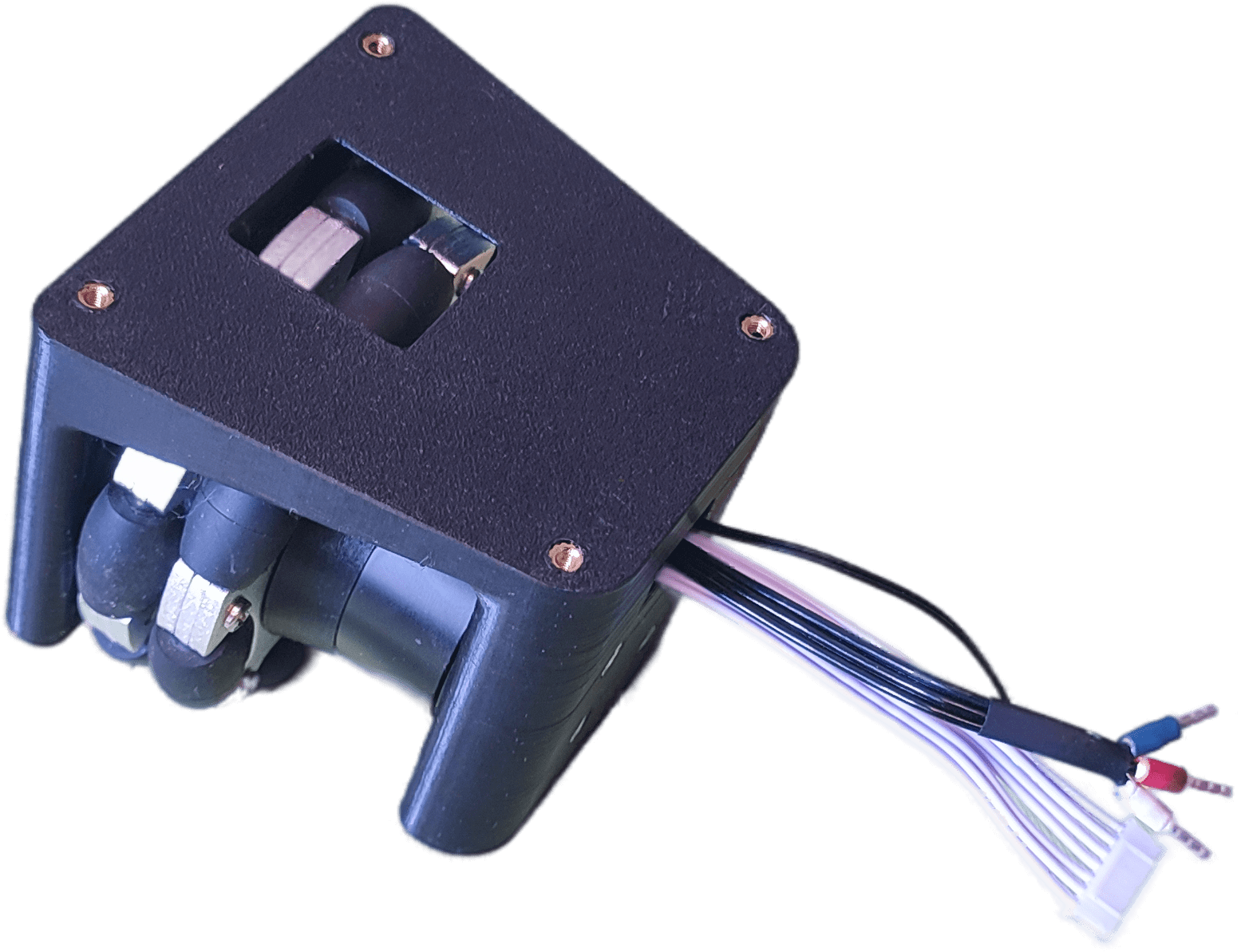
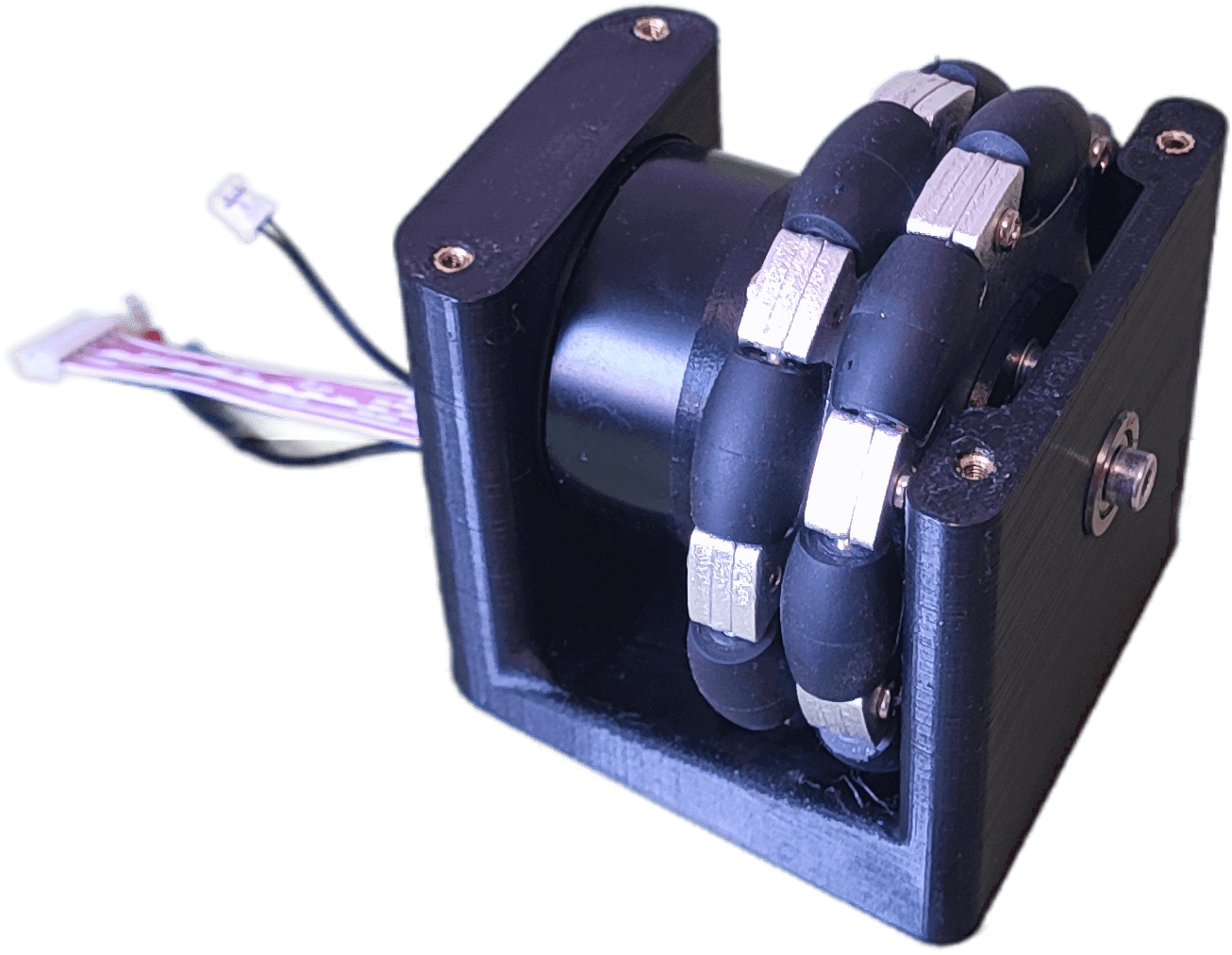
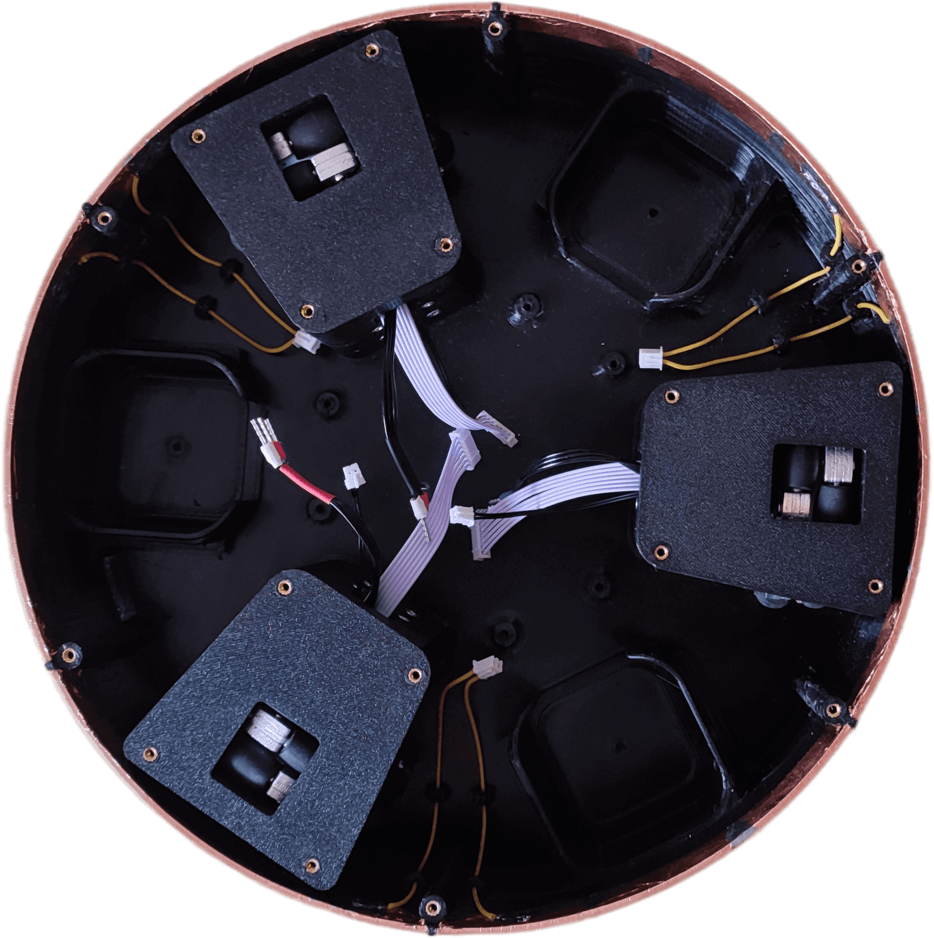
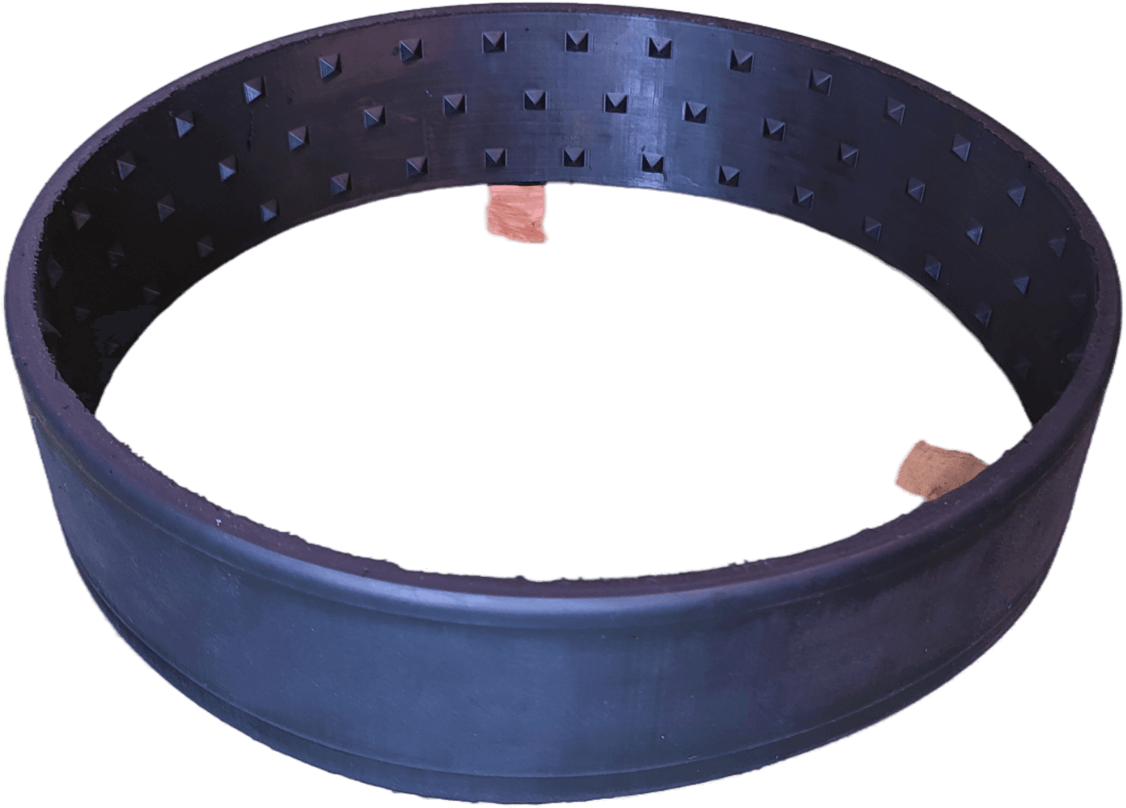
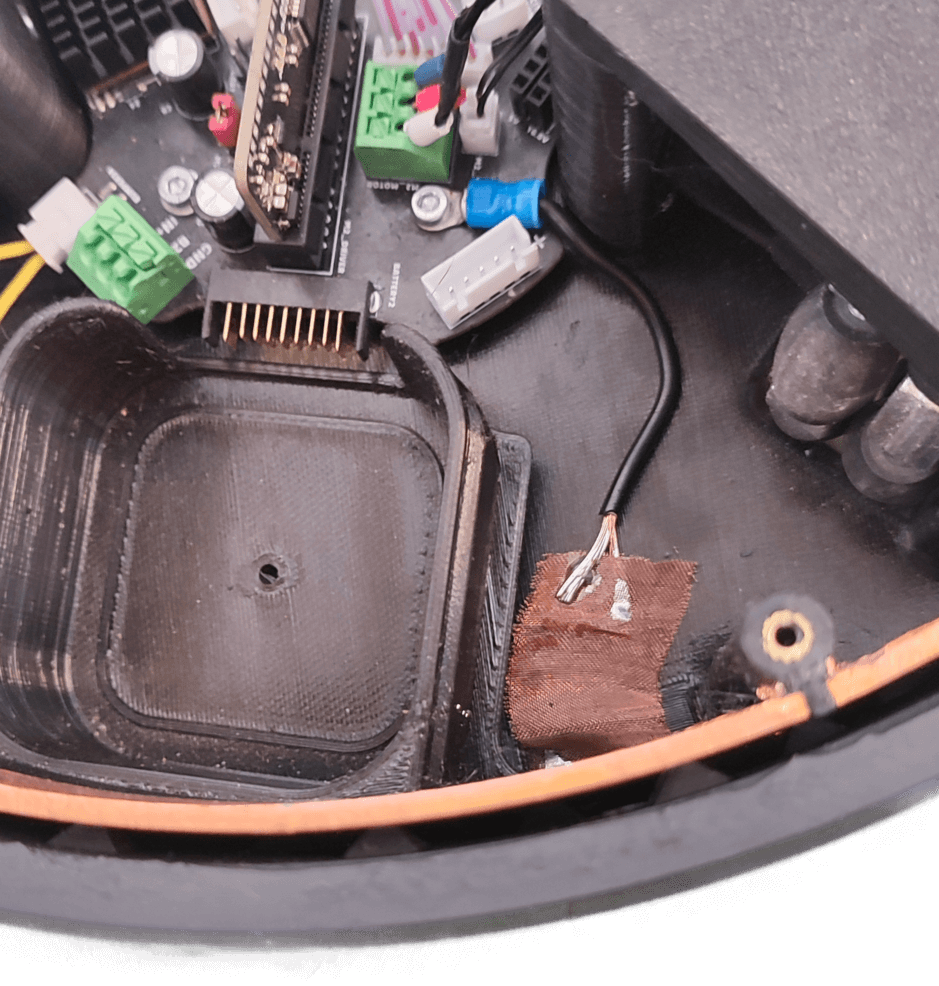
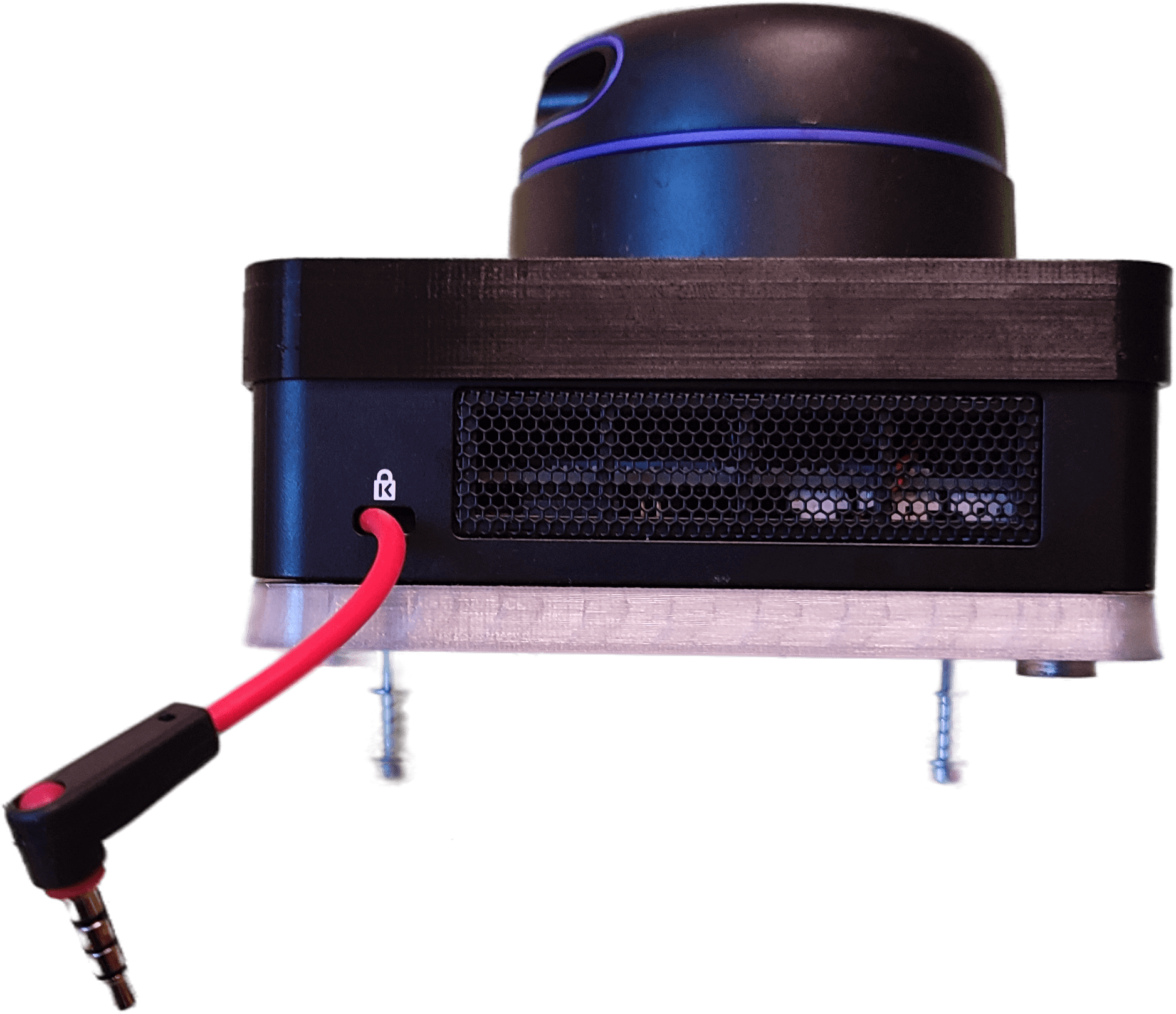
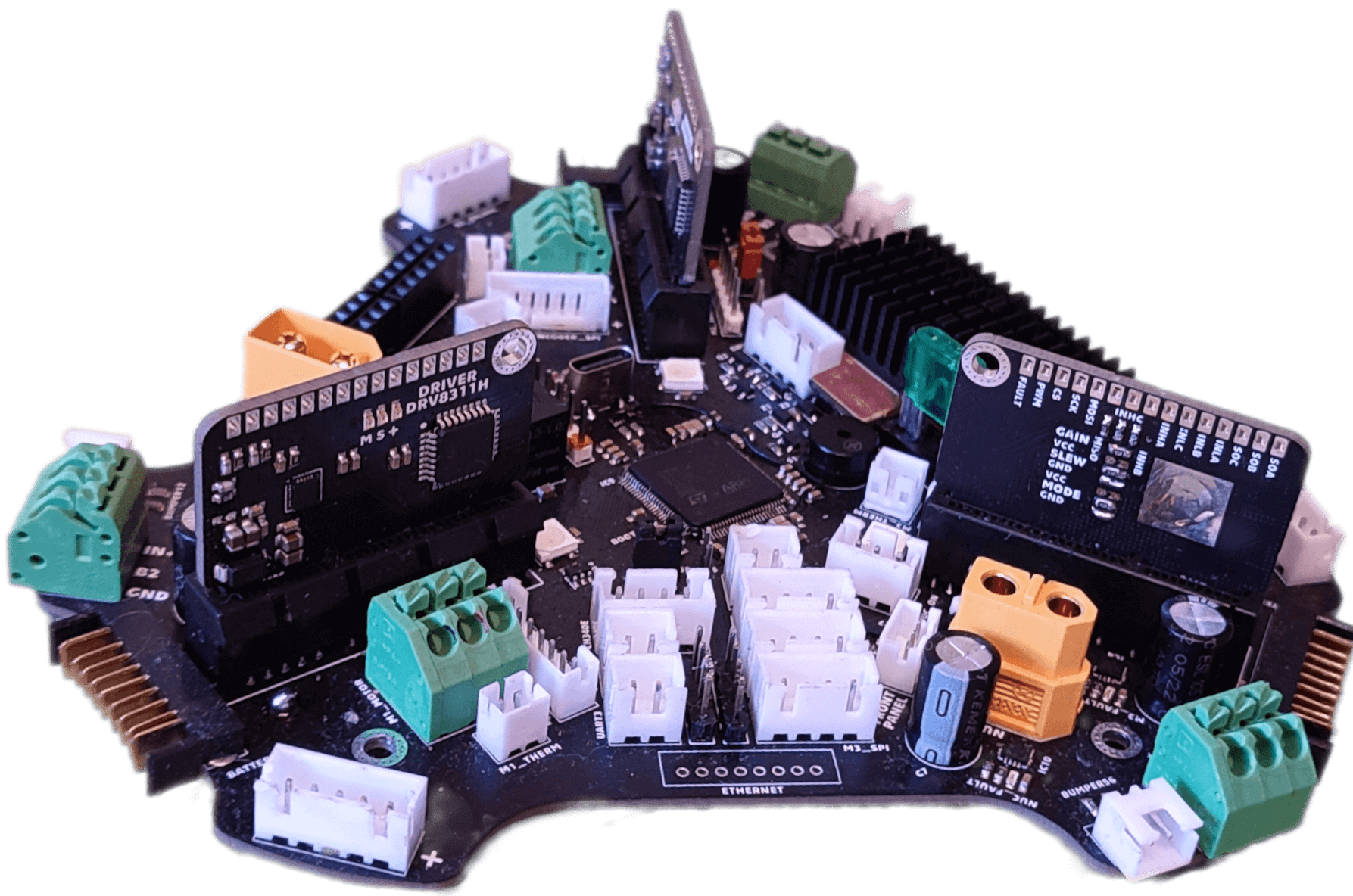
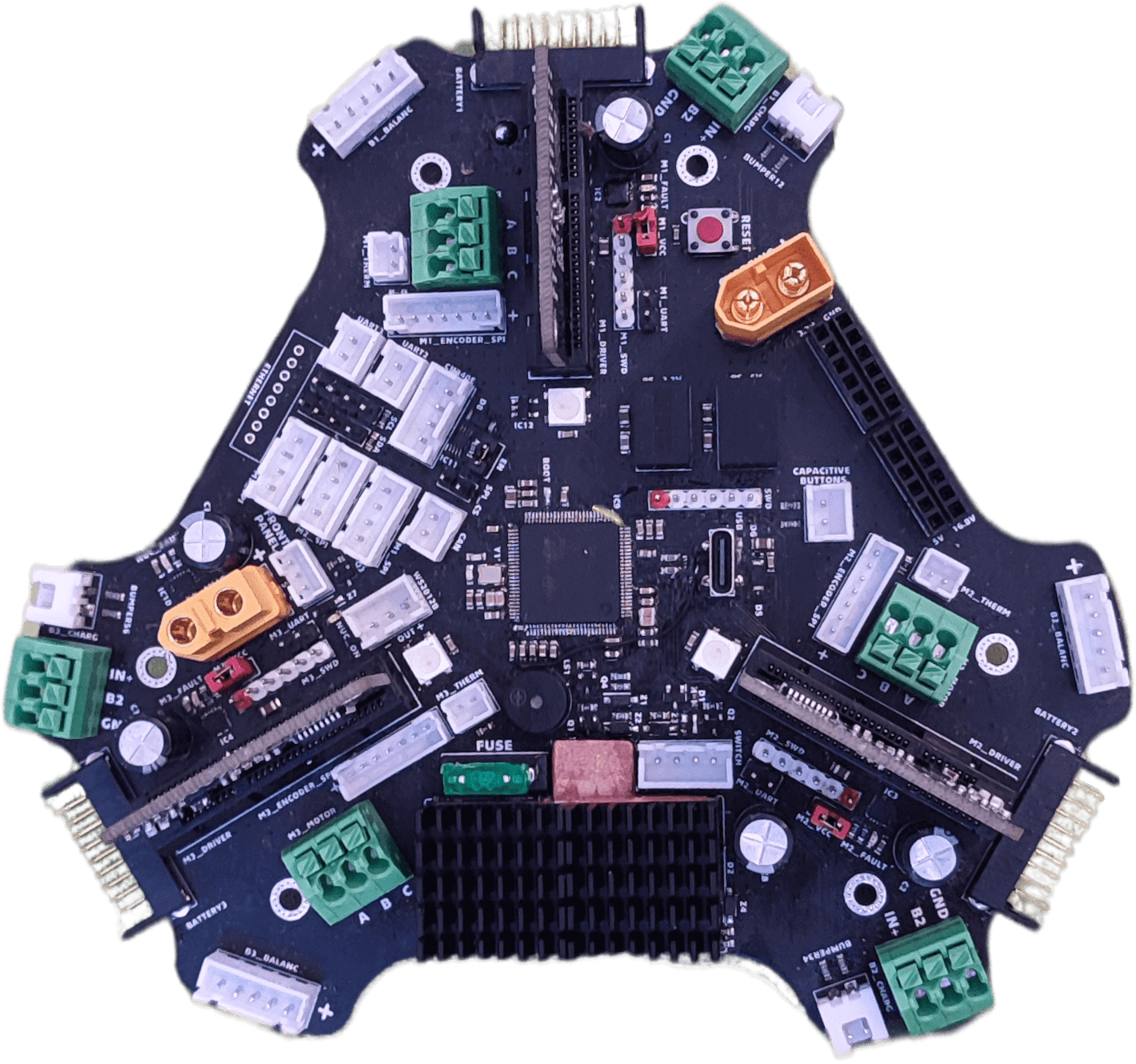
The platform features a modular design, making it easy to assemble and maintain. Its innovative components include BLDC motors for smooth and efficient movement and a capacitive tactile bumper for omnidirectional navigation. The robotic platform offers a wide range of learning opportunities, from kinematics to advanced software applications.
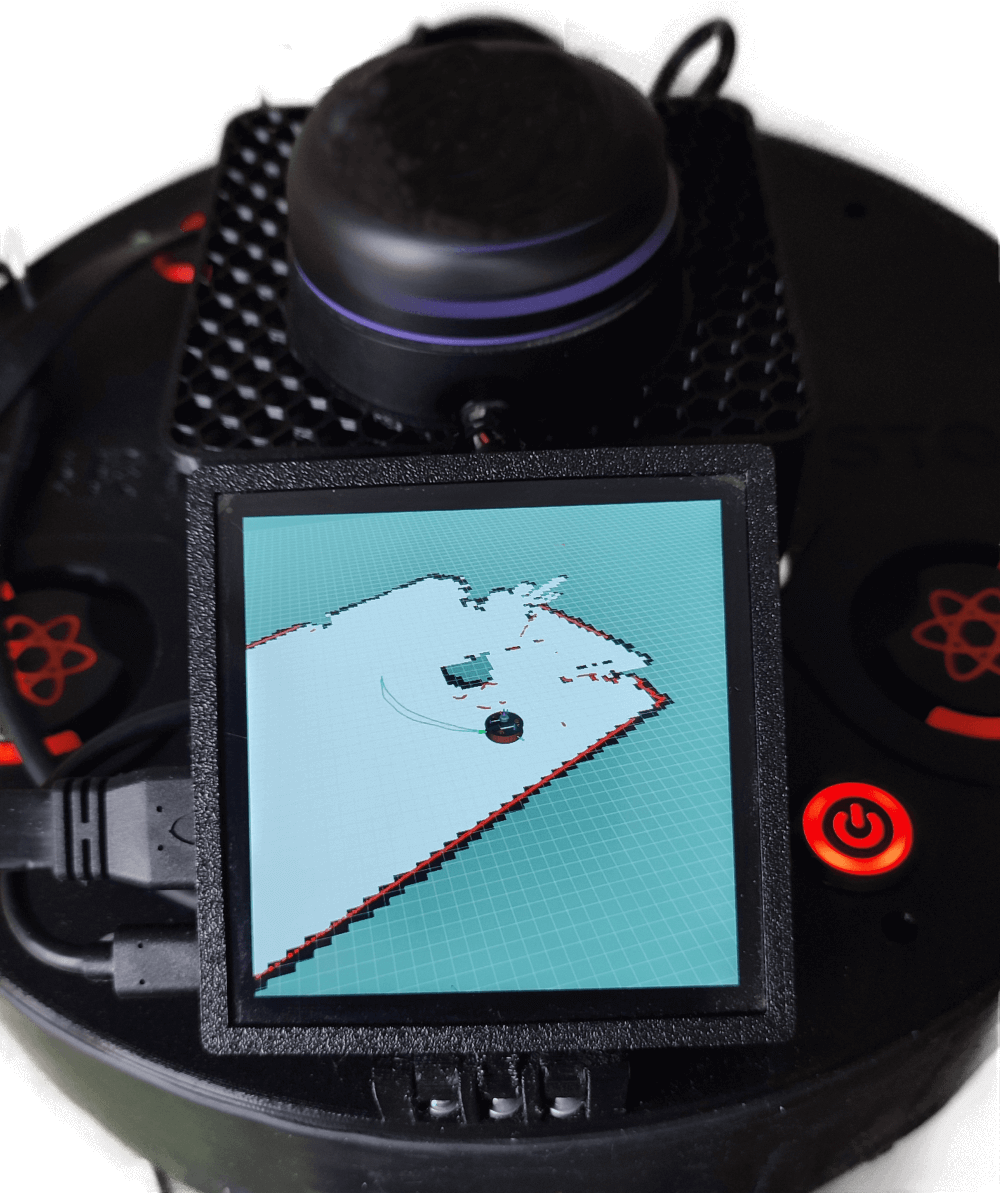
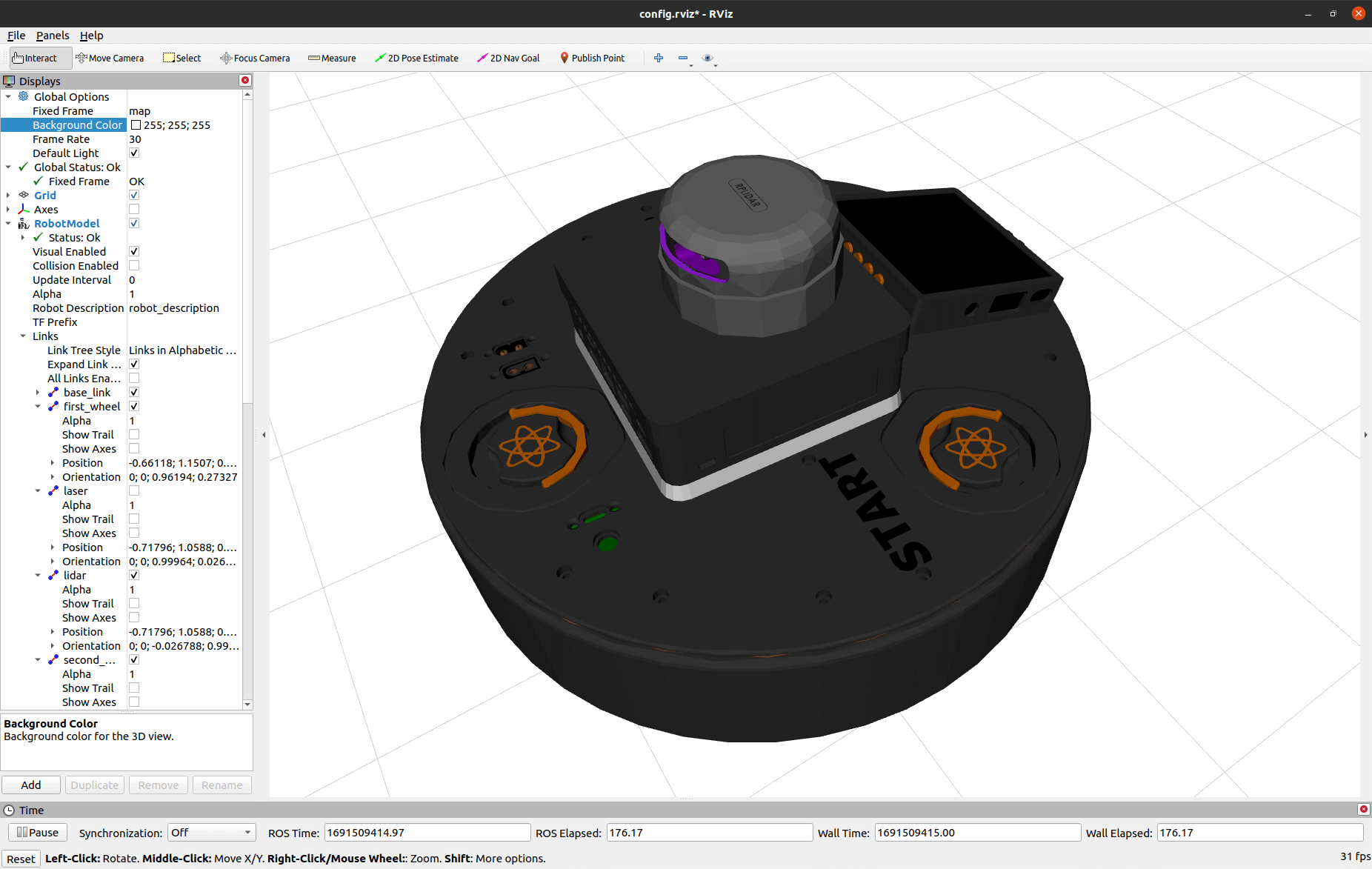
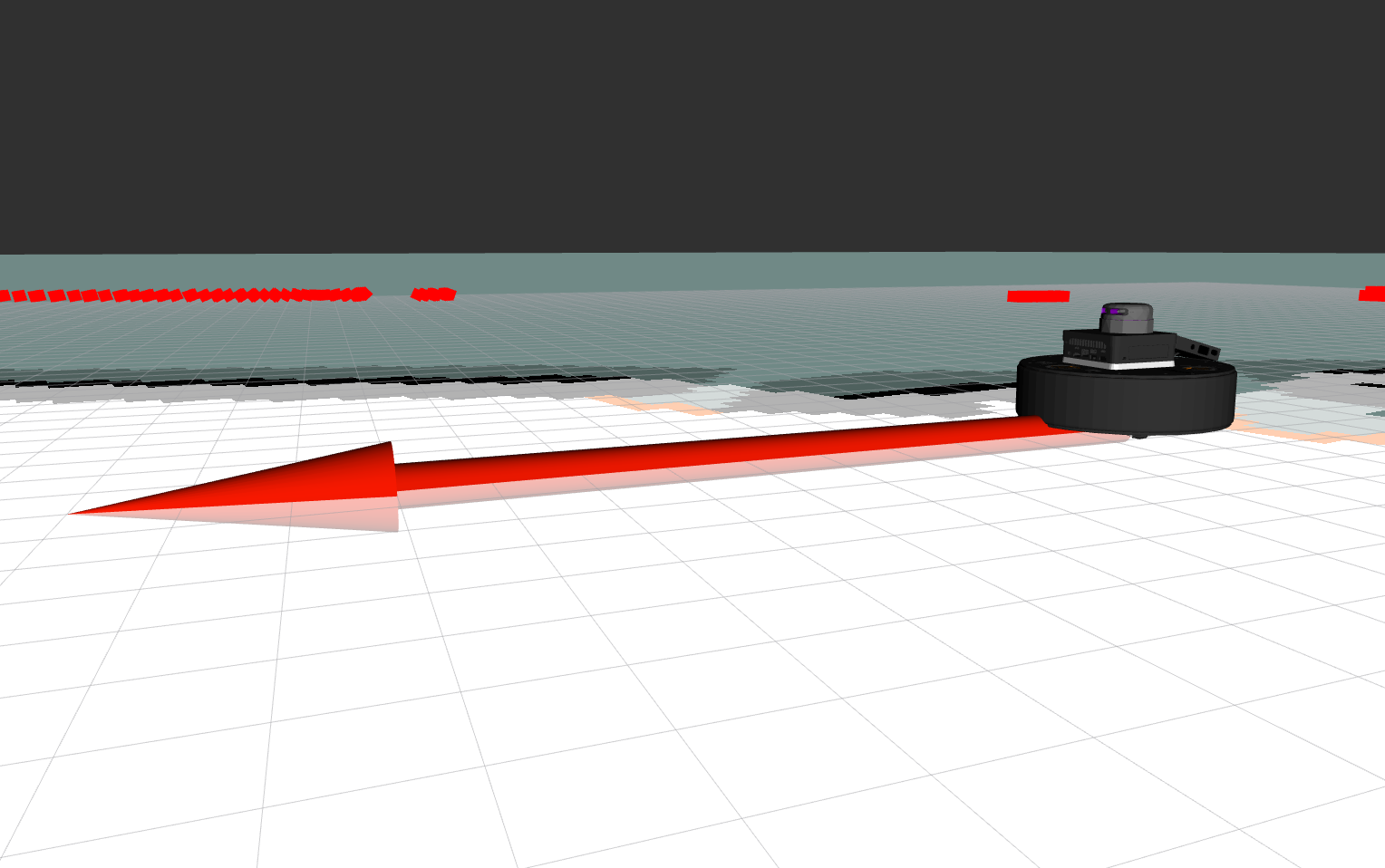
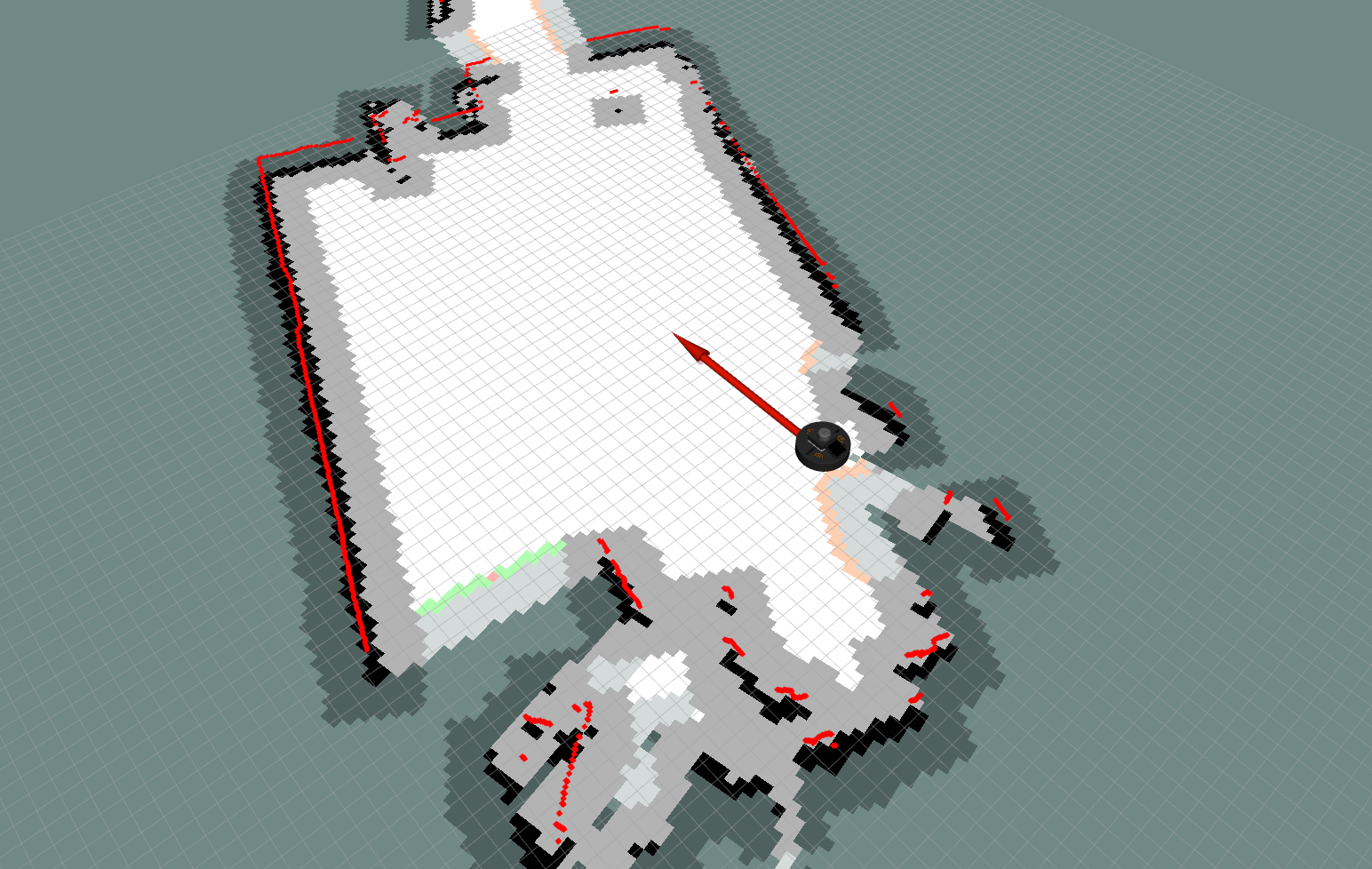
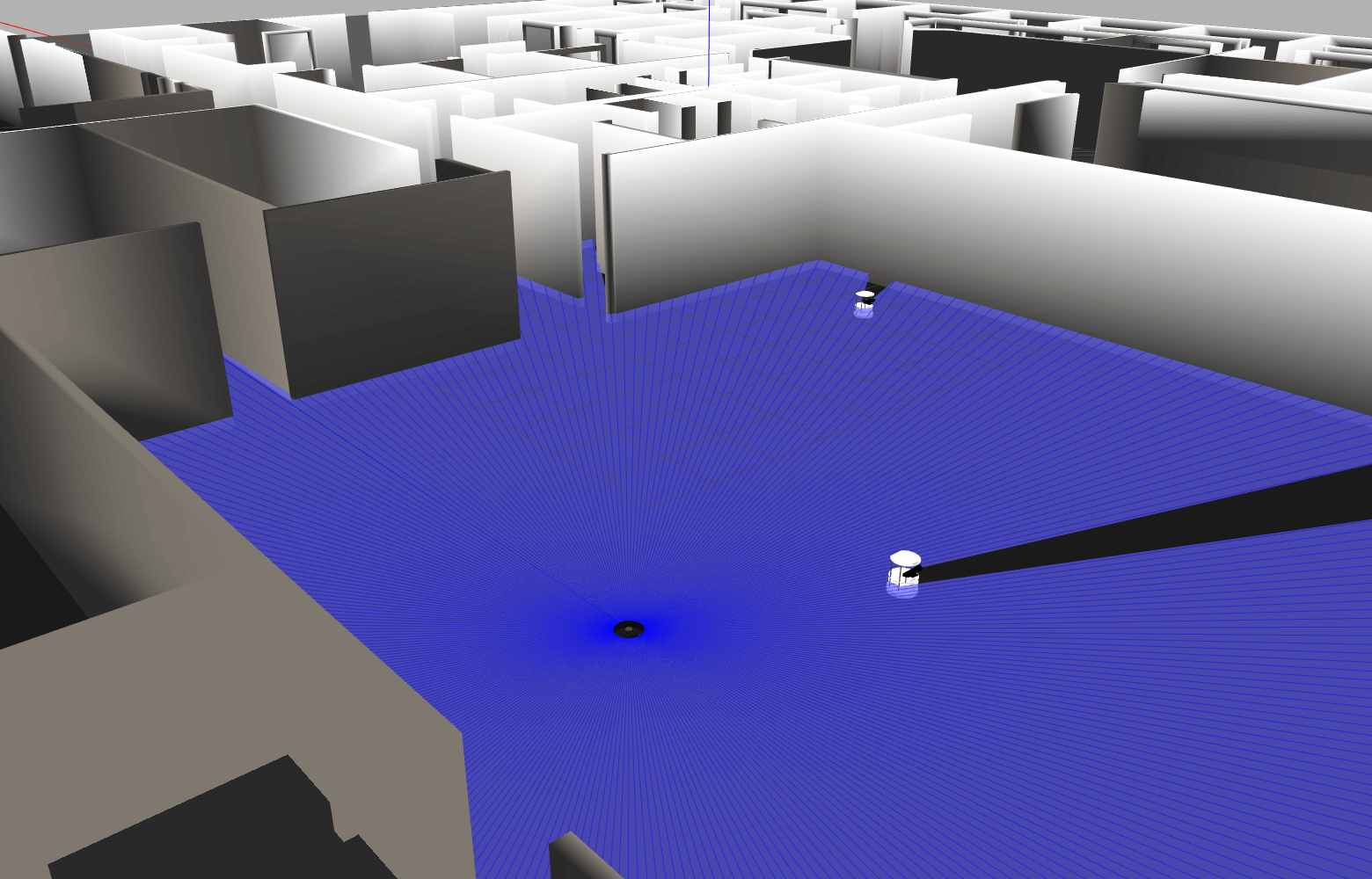
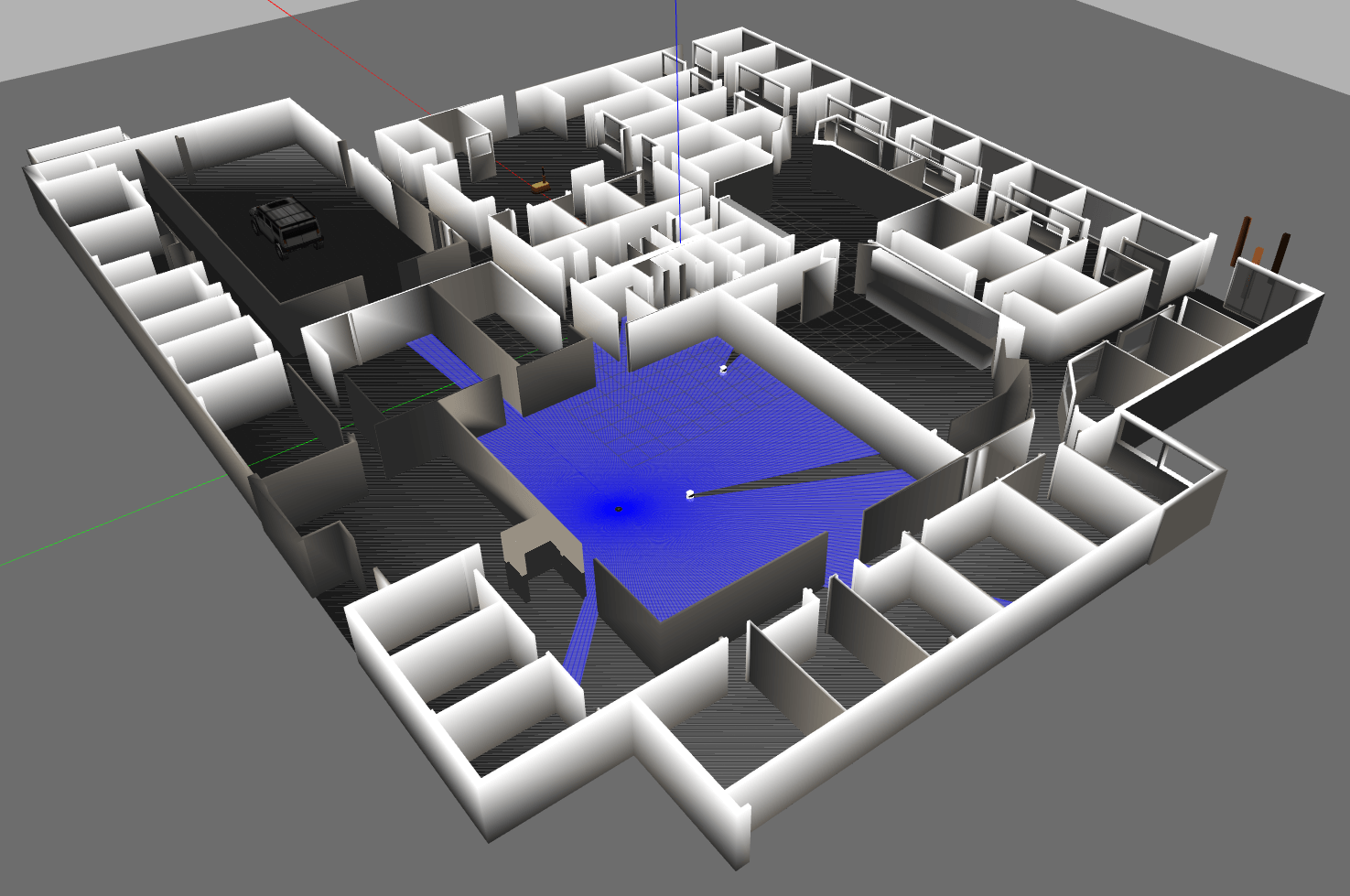
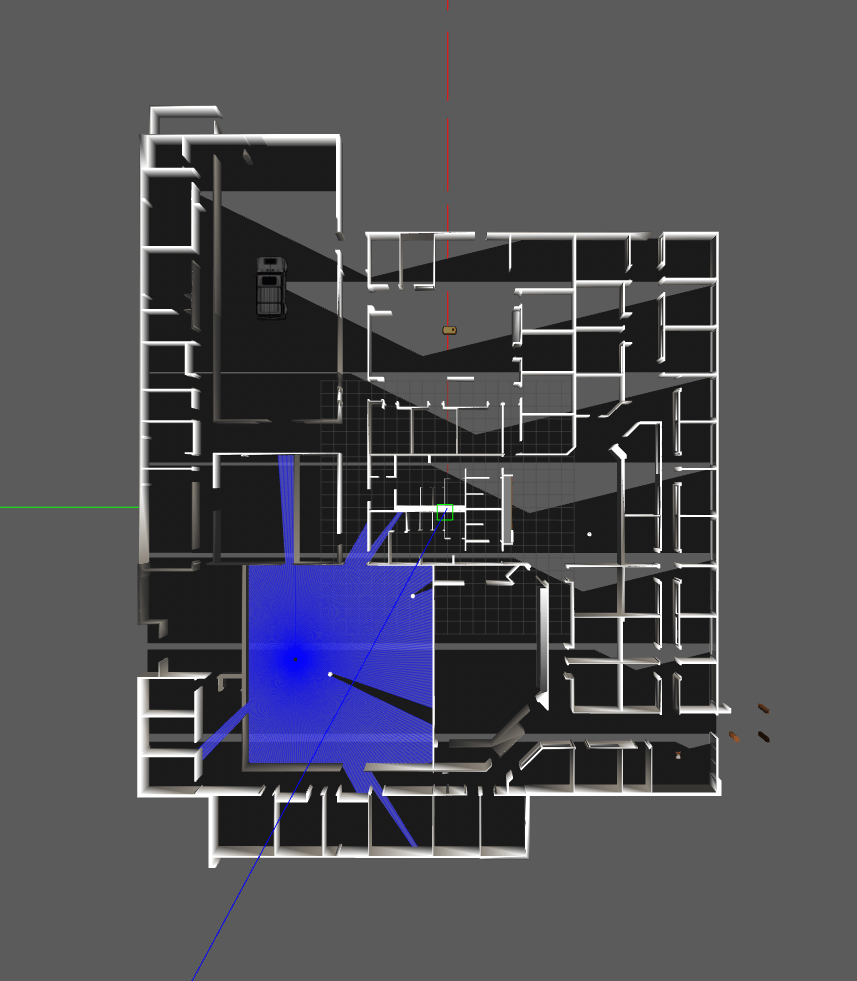
SRobot is built around the Robot Operating System (ROS), providing students with a gateway to real-world robotics frameworks. Lessons range from firmware development to implementing SLAM algorithms, ensuring a comprehensive understanding of robotics principles. Its open-source approach enables extensive customization, allowing students to experiment and innovate.
By connecting theory to practice, SRobot empowers university students to solve complex problems and gain skills for future careers. It represents a leap forward in educational tools, turning challenges into opportunities for learning and growth.
- Master's thesis
- 2023